Demonstration of Safe Area Estimation by Trajectory Prediction Using Nonparametric Bayesian Inverse Reinforcement Learning
Exhibition event
- Automotive World 2020 (January 2020)
Contents
- Estimation of safe area using trajectory prediction of other vehicles in an intersection scene.
- Inverse reinforcement learning is used to predict the trajectories of other vehicles and humans.
By using a nonparametric bayesian-based algorithm as an elemental technology, the following advantages can be realized.
- Predictions close to human senses are possible
- Requires less training data than conventional DeepLearning or probabilistic models
- Can be processed by edge devices
- Possible to analyze what is used to output inference results
- No need for humans to provide parameters; the model itself makes the decision
Tools
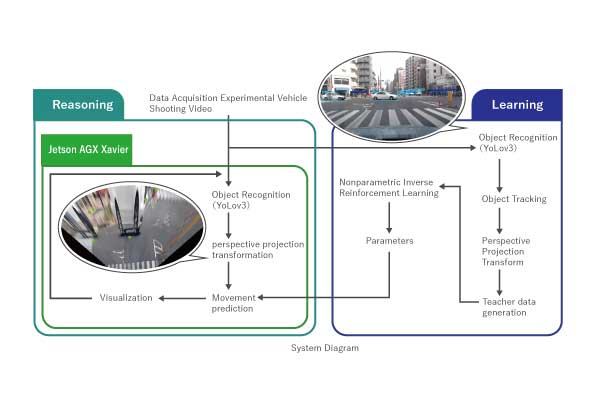
- Algorithm: ddBNIRL
- Edge device: NVIDIA Jetson AGX Xavier
- Green: Trajectory prediction results for other vehicles