- xOpt(クロスオプト)はAGV等、複数のマテハン機器を対象として経路・行動計画を生成する最適計画自動立案ソフトウェアです。
- 「Transit Optimal Platform」等の他システム(既存のコントローラシステム等)への組み込みが可能です。
【xOptの計算出⼒】
- 各移動体に対するタスク割り当て
- 各移動体の経路
- 各移動体のアクション(速度/⾏動)
xOptの特徴
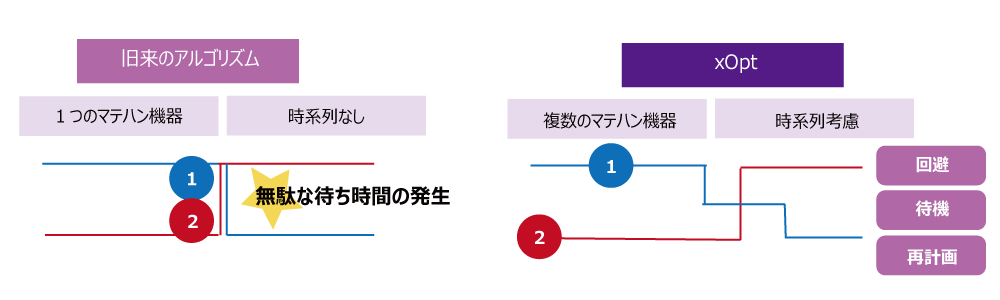
- 複数エージェント(対象マテハン機器)、複数タスクの全体最適化が可能
旧来よく使用されている経路生成アルゴリズムはエージェントが1台のみで時系列を考慮していない最適化ですが、xOptは複数台における最短経路・行動計画を行い、かつ時間・他エージェントの車速を考慮した最適化アシストを行います。
- *各マテハン機器の振る舞いを考慮した最適化
-
- 燃費、電力消費の概念を入れることによってエネルギマネジメントを行う事も可能
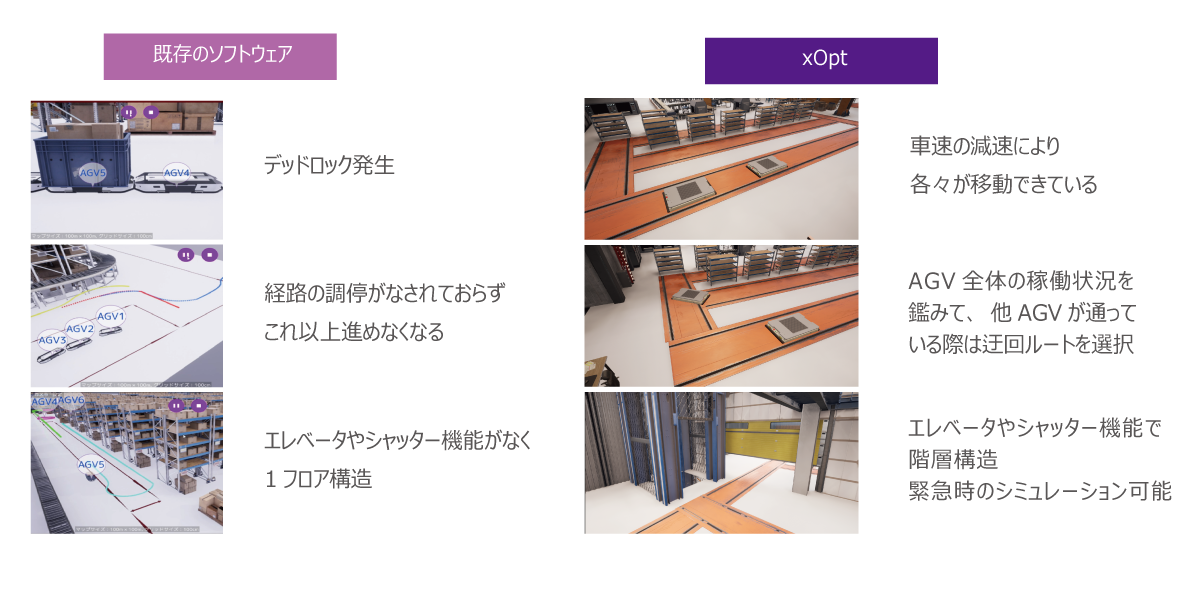
- 部品を積載した際の速度減衰が表現できる
- 車間距離に応じた目標車速決定が可能
- 搬入や搬出といった特殊なシチュエーションにおける待機動作も設定
- 他車両に近づきすぎる場合は減速・停車をアルゴリズム側で計算
- *より最適化されたタスク割り当て
-
- 位置関係から自動的にタスクを割り当てるのではなく、実際にタスクを割り当てて一番最適であった割り当て順を採用
- エレベータ・シャッター機能もオプションとして追加することが可能
- モジュールでのご提供のため、他システム(既存のコントローラシステム等)への組み込みが可能